
激光陀螺仪小组介绍
具有高分辨本领、优良的稳定度和超大量程等优点的陀螺仪,是精密转动测量和惯性导航中最重要的仪器之一。激光陀螺仪的工作原理基于Sagnac效应。如图1所示,当一个环绕面积为A,周长为P的环形光学腔以角速度Ω旋转时,其顺时针方向同逆时针方向的光学腔长会存在细小的差别。当波长为𝜆的激光在其中共振时,由于这种细小的腔长差别,导致两个方向的共振频率略有差别,这个频率差称为Sagnac频率,满足
![]()

图1:基于Sagnac效应的环形干涉仪
激光陀螺仪根据工作原理的不同,可以分为主动式激光陀螺仪和被动式激光陀螺仪,如图2所示。主动式激光陀螺仪环形腔内部有增益介质,本质上是一个两个方向同时出光的环形激光器。而被动式陀螺仪环形腔内没有增益介质,由外部注入激光分别锁定到光学环形腔两个方向的共振模式上。
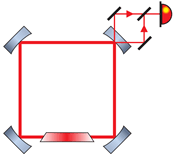
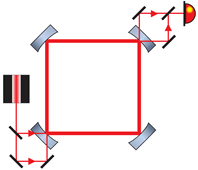
图2:主动式激光陀螺仪和被动式激光陀螺仪
主动式激光陀螺仪由于其结构简单,可以避免高精细度光学腔模式匹配以及激光反馈锁定等等复杂的技术问题,获得了较为广泛的应用。然而,当陀螺仪环形腔长达到米量级之后,其过窄的自由光谱区频率间隔远小于增益介质的增益带宽,而导致激光模式竞争的出现。为避免模式竞争影响陀螺仪的测量精度,主动式激光陀螺仪往往工作在较低的光功率条件下。被动式激光陀螺仪由于内部没有增益介质,可以工作在较强的光强状态下,对提高转动测量的灵敏度有很大的发展潜力。
随着大型激光陀螺仪对旋转测量精度的不断提高,其应用范围从导航领域扩展到地球旋转角速度的监控,例如周期为一天的极移和固体潮测量,周年极移和周期为435天的钱德勒摆动,日长变化,以及在地球上直接测量由地球转动而产生时空拖拽的Lense-Thirring效应等等。目前全世界对于地球自转检测精度最高的大型激光陀螺仪是位于德国Wettzell大地测量天文台的4 m×4 m一体化激光陀螺仪G-ring。
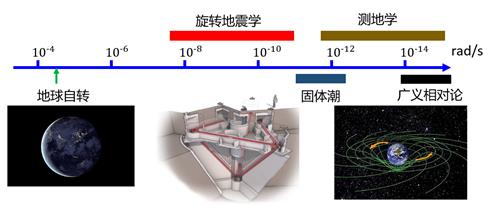
图3:不同精度下的大型陀螺仪在物理学中的应用
我课题组于2014年开展大型被动激光陀螺仪的研究。目前已初步实现1 m×1 m大型被动激光陀螺仪原理样机运行,如图4所示。选用热膨胀系数为10-6K-1的花岗岩平台作为激光陀螺仪的基底,设计并搭建了装有超高反射率环形腔的陀螺仪真空系统。通过测量锁定在激光陀螺仪环形腔正反两个方向模式的激光频率差,获得了高精度的转动测量结果。2018年,被动式激光陀螺仪转动测量敏感度噪声降低至2×10-9rad/s/Hz1/2,在2000秒积分时间下,相对稳定度达到了2×10-9rad/s。测量结果如图5和图6所示。

图4:1 m×1 m激光陀螺仪平台搭建
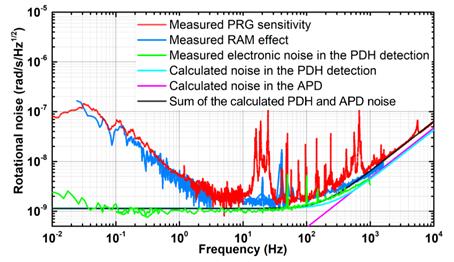
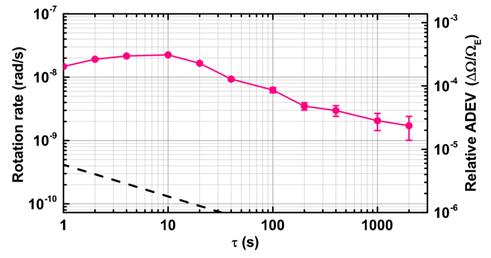
图5:(a) 1 m×1 m激光陀螺仪旋转噪声谱密度。 (b) 1 m×1 m激光陀螺仪旋转噪声以及相对艾伦偏差。
在完成了1 m×1 m陀螺仪基础上,课题组开展了尺寸更大、精度更高的3 m×3 m被动激光陀螺仪的研究,如图7所示。通过快慢速PZT协同锁定实现了对该12 m腔长的主动控制,抑制后的腔长位移噪声为8×10-12m/Hz1/2@1 mHz,旋转探测灵敏度达到了7×10-10rad/s/Hz1/2@15 Hz。
陀螺仪团队项目负责人为张洁教授,目前团队中有博士后二人,博士研究生二人,硕士研究生二人,形成了结构较为合理,具有较强凝聚力和战斗力的科研团队。博士生柳奎和张风雷在德国和美国进行学术交流的照片如图8所示,图9为课题组赴意大利参加国际会议。
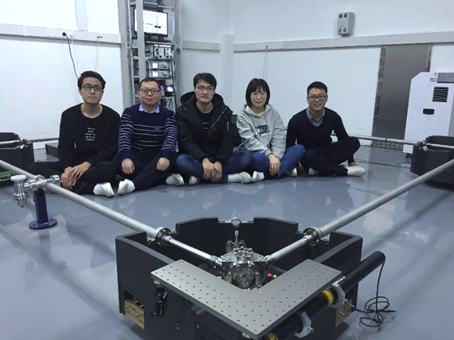
图7:3 m×3 m陀螺仪首次闭环工作,主要小组成员合影。
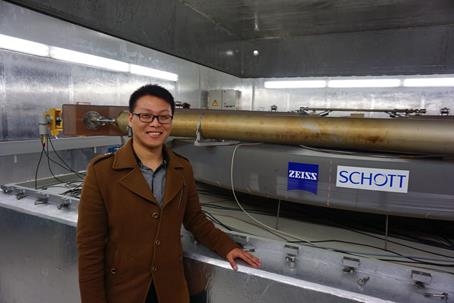
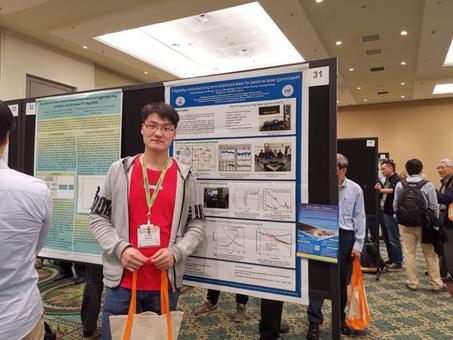
图8:(a) 博士生柳奎在德国Wettzell进行学术交流,并参观G-ring。(b)博士生张风雷在美国参加EFTF-2019国际会议。

图9:课题组赴意大利参加第二届引力磁效应与大尺度转动测量国际会议